試驗方案
本次試驗是在鏈條斗式提升機空載試運行時進行的,試驗分兩次完成,首先機頭機尾電機同時啟動并記錄電機電流變化規律;待雙機啟動完成并運行結束后,僅啟動機頭電機實現空載運行并記錄電機電流變化規律。根據兩種不同驅動方式來測量空載運行下的阻力系數。
試驗結果分析
在雙電機驅動下,機頭電機與機尾電機消耗功率步調一致且數值相同。
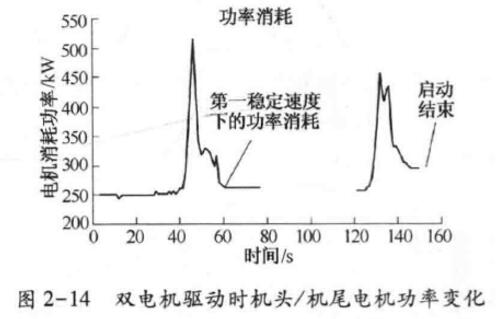
圖2-14為雙電機(機頭電機與機尾電機)驅動時,機頭/機尾電機驅動功率隨時間變化曲線。圖2-15為僅機頭電機驅動時,其消耗功率隨時間變化曲線。圖2-14表明,鏈條斗式提升機啟動時,首先將驅動鏈輪通過液力耦合器提高到某一速度,待鏈條穩定運行后繼續提速直到鏈速達到額定速度。在電機功率消耗曲線上表現為40s之前的穩定輸出250kW;40~60s之間電機輸出功率由250kW增加到510kW,然后回落到267kW;60~125s之間驅動功率穩定在267kW;126~146s之間電機輸出功率由267kW增加到455kW,然后回落到294.5kW;1468之后,電機輸出功率穩定在294.4kW。
單電機驅動啟動試驗時,驅動電機除了需要克服鏈條等運行設備的阻力,同時還有機尾電機的附加阻力,所以該試驗并未將鏈條斗式提升機鏈條速度達到最大,僅將鏈條速度提高到0.6m/s,且運行時間短。圖2-15可知電機啟動2s后,電機輸出功率由500kW降低到350kW,第2~115s之間鏈條穩定運行,輸出功率穩定在350kW,115s之后電機逐漸減速,直至輸出功率降低為250kW。
啟動電機功率消耗由兩部分組成:一部分用于維持自身運動;另一部分功率用來驅動副板輸送機。假設在運行中電機用于自身消耗功率為250kW,則用于驅動單側鏈條消耗功率如圖2-16所示。
分析圖2-16可得,當t=40s時,開始啟動鏈條斗式提升機,此時驅動功率迅速增加至260kW,該功率一部分用于克服液力耦合器阻力,其余部分用來克服鏈條等附件靜摩擦力。t=50s時,電機輸出驅動功率迅速下降,此時鏈條開始啟動,靜摩擦力開始轉為動摩擦力,驅動功率逐步下降,鏈條速度逐步提高,t=60s時到達第一穩定速度0.6m/s,此時消耗功率為17kW,穩定運動2min后再次進人加速階段直至額定速度1.54m/s,此時消耗的功率為44.4kw。
鏈條提升機驅動鏈輪負載試驗
空載運行階段,鏈條消耗功率波動范圍較窄,故取平均功率計算,以獲得穩定運行階段阻力系數。
在雙機驅動時,機頭電機輸出有效功率為P1=44.4kW,單電機驅動時,機頭電機輸出功率P2=345-250=95kW,即可視為單機驅動:電機需要為上下鏈條提供動力且帶動另外一個鏈輪旋轉。而雙機驅動時任一電機可視為只為上下鏈條中的任一鏈條提供動力,P2>2P1則P2-2P1可視為對另外一電機實施倒拖所消耗功率。假定空載時上下鏈條驅動功率一致,即認為每一鏈條消耗的功率為44.4kW。